
Tooted
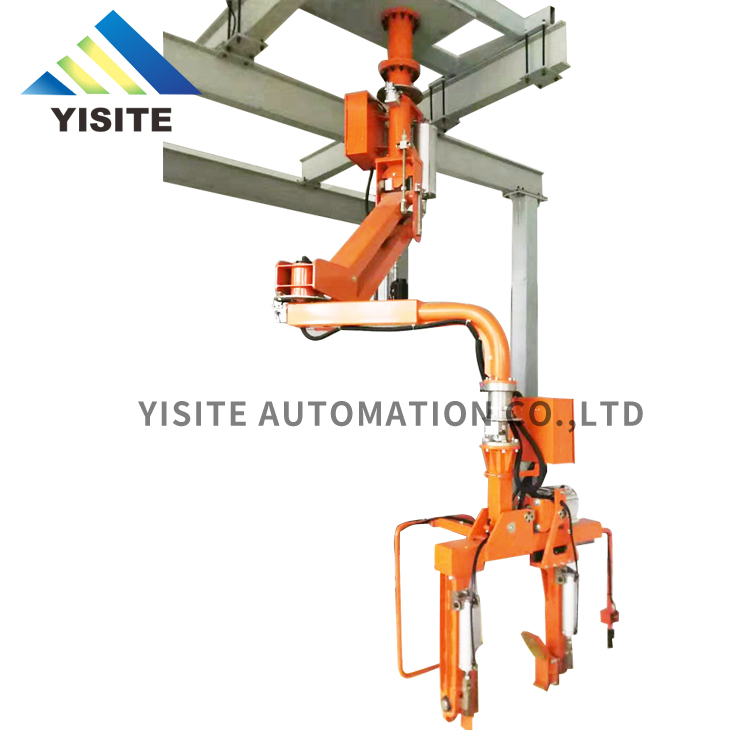


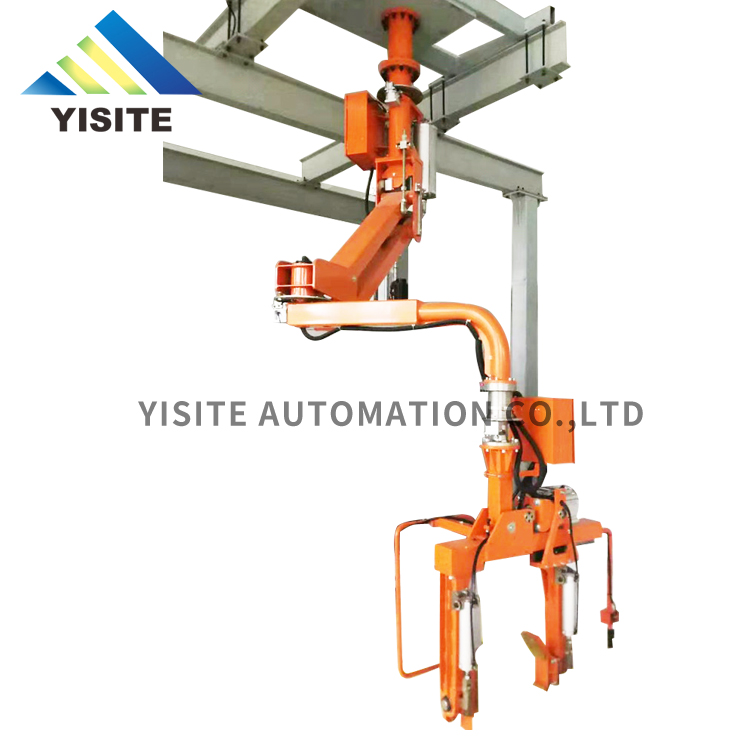
vedrustus Konsoolkraanade manipulaator
Lühikirjeldus:
Vedrustusvõimendi manipulaator koosneb paigaldusalusest, peremees- ja terasvardast, kinnitusest. Peamist õlavart saab pöörata 360 kraadi, teist õlavarda saab pöörata 270 kraadi, et saavutada katvuse tööpiirkond, ja pöörlemine võib lisada pidurimehhanism. See sobib kõrgsageduslikuks käsitsemiseks, positsioneerimiseks, komponentide kokkupanekuks ja muudel juhtudel.



meie kohta

Oleme professionaalne kohandatud automaatikaseadmete tootja. Meie toodete hulka kuuluvad kaubaaluste mahalaadija, komplekteerimis- ja pakkimismasin, kaubaalustaja, robotite integreerimisrakendus, laadimis- ja mahalaadimismanipulaatorid, kartongi vormimine, karbi sulgemine, kaubaaluste jaotur, pakkimismasin ja muud automaatikalahendused tagaotsa pakendi tootmisliini jaoks.
Meie tehase pindala on umbes 3500 ruutmeetrit. Tehnilisel põhimeeskonnal on keskmiselt 5-10-aastane mehaanilise automatiseerimise kogemus, sealhulgas 2 mehaanikakonstruktorit. 1 programmeerimisinsener, 8 montaažitöötajat, 4 müügijärgset silumistöötajat ja veel 10 töötajat
Meie põhimõte on "klient esiteks, kvaliteet esiteks, maine esikohal", aitame alati oma klientidel "suurendada tootmisvõimsust, vähendada kulusid ja parandada kvaliteeti", püüdleme saada masinate automatiseerimise tööstuse tipptarnijaks.
Toote omadused
Tuvastades iminapa või manipulaatori otsa ja tasakaalustades gaasirõhku silindris, suudab see automaatselt tuvastada mehaanilise käe koormuse ja reguleerida automaatselt silindri õhurõhku pneumaatilise loogika juhtimisahela kaudu, et saavutada automaatse tasakaalustamise eesmärk.Töö ajal ripuvad rasked esemed justkui õhus, mis võib vältida toote dokkimise kokkupõrget.Mehaanilise hoova tööpiirkonnas saab operaator seda hõlpsalt tagasi, vasakule ja alla liigutada. asendis ja inimene ise saab hõlpsasti töötada. Samal ajal on pneumaatilisel ahelal ka ketikaitsefunktsioonid, nagu objekti juhusliku kadumise vältimine ja rõhukadu kaitse

Vedrustusjõu manipulaatori tööpõhimõte ja režiim:
Tuvastades iminapa või manipulaatori otsa ja tasakaalustades gaasirõhku silindris, suudab see automaatselt tuvastada mehaanilise käe koormuse ja reguleerida automaatselt silindri õhurõhku pneumaatilise loogika juhtimisahela kaudu, et saavutada automaatse tasakaalu otstarve.Töö ajal ripuvad rasked esemed justkui õhus, mis võib vältida toote dokkimise kokkupõrget.Mehaanilise käe tööpiirkonnas saab operaator seda hõlpsalt tagasi, vasakule ja alla mis tahes asendisse liigutada , ja inimene ise saab hõlpsasti töötada. Samal ajal on pneumaatilisel ahelal ka ketikaitsefunktsioonid, nagu näiteks objekti juhusliku kadumise vältimine ja rõhukadu kaitse
Omadused
Maksimaalne kandevõime. 900 kg
Maksimaalne tegevusraadius: 4500 mm
Vertikaalne reisimine: 0,5m/min
Juhtimissüsteem: 2200 mm
Juhtimissüsteem: õhk täispneumaatiline
Pakkumine: suruõhk (40 µm), ei sisalda rasva
Töörõhk: 0,7 ÷ 0,8 MPa
Töötemperatuur: +0° kuni +45°C
Müra:õhu tarbimine: 100 Nl ÷ 400 N tsükli kohta
Pöörlemine: kolonni võll ja kinnitusvõll 360° pidev pöörlemine, keskmine võll 300° pidev pöörlemine







