
Tooted



iminappaga klaasi käsitsemise pneumaatiline manipulaator
Lühikirjeldus:
Pneumaatiline manipulaator, tuntud ka kui manipulaator, tasakaalukraana, tasakaaluvõimendi, käsitsi koormuse ülekandmise masin (ülaltoodud väide ei ole professionaalne, kuid on Hiinas populaarne), on uudne, mida kasutatakse materjali käitlemiseks ja paigaldamiseks ning jõuseadmete tööjõu säästmiseks.

iminappaga klaasi käsitsemise pneumaatiline manipulaator rakendab jõu tasakaalu põhimõtet, nii et kasutaja saab rasket eset vastavalt lükata ja tõmmata, mis tasakaalustab liikuvat positsioneerimist ruumis. Raske ese moodustab tõstmisel või langetamisel ujuva oleku ja mitte tööjõu tagab gaasitee (töötlemisprotsessi ja projekteerimiskulude kontroll, tööjõud on hinnangustandardina alla 3 kg) tööjõudu mõjutab töödeldava detaili kaal. Ilma oskusliku kasutamiseta on operaator saab rasket eset käsitsi lükata ja tõmmata ning asetada raskuse ruumis igasse asendisse.

meie kohta

Oleme professionaalne kohandatud automaatikaseadmete tootja. Meie toodete hulka kuuluvad kaubaaluste mahalaadija, komplekteerimis- ja pakkimismasin, kaubaalustaja, robotite integreerimisrakendus, laadimis- ja mahalaadimismanipulaatorid, kartongi vormimine, karbi sulgemine, kaubaaluste jaotur, pakkimismasin ja muud automaatikalahendused tagaotsa pakendi tootmisliini jaoks.
Meie tehase pindala on umbes 3500 ruutmeetrit. Tehnilisel põhimeeskonnal on keskmiselt 5-10-aastane mehaanilise automatiseerimise kogemus, sealhulgas 2 mehaanikakonstruktorit. 1 programmeerimisinsener, 8 montaažitöötajat, 4 müügijärgset silumistöötajat ja veel 10 töötajat
Meie põhimõte on "klient esiteks, kvaliteet esiteks, maine esikohal", aitame alati oma klientidel "suurendada tootmisvõimsust, vähendada kulusid ja parandada kvaliteeti", püüdleme saada masinate automatiseerimise tööstuse tipptarnijaks.
- 1. Struktuur: täispneumaatiline manipulaator koosneb peamiselt paigaldusmäluseadmest ja kinnitusest.2. Paigaldusvundament jaguneb: 1. Stabiilne sammas 2. Alus liikuv 3. lae riputus fikseeritud 4Lae vedrustus on mobiilne
3. Kinnitus: üldiselt kohandatud vastavalt kliendi poolt pakutava tüki välimuse suurusele.1. konksu tüüp; 2. haaramise tüüp; 3. pingutamise tüüp; 4. sisetõusu tüüp; 5. liftitüüp; 6. haardetüüp; 7. käepideme pöörde teisendus (pööramine 90° või 180°) 0; 8. vaakum-adsorptsioon; 9. vaakum-adsorptsiooni pöörde transformatsioon (pööramine 90° või 180°) ja muud, spetsiaalselt valitud ja välja töötatud ning kujundatud, on saavutanud hea kasutusefekti.
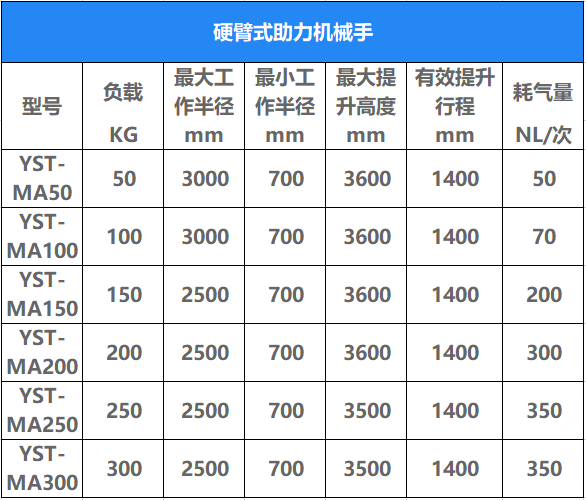
4. Host: koosneb peamiselt tasakaalustatud silindrist ja jäigast mitmest väljalülituskonsoolist ning peamised parameetrid on tõstevõime ja teenindusraadius.
Toote kirjeldus
iminapp klaasi käsitsemine Pneumaatilised manipulaatorid on loodud töötama üle rippuva koormaga. Seetõttu on need tööstusmasinate peale- ja mahalaadimisel hädavajalikud. Tänu pneumaatilistele tarvikutele ja spetsiaalsetele lisaseadmetele on võimalik mitte ainult osi tõsta, vaid ka pöörata, kallutada, et pöörata või, lihtsamalt öeldes, kallutada.
Toote omadused
1. Täielik pneumaatiline manipulaator koosneb peamiselt paigaldusmäluseadmest ja kinnitusest.
2. Paigaldusvundament jaguneb: 1. Stabiilne sammas 2. Alus liikuv 3. lae riputus fikseeritud 4Lae vedrustus on mobiilne
3. Kinnitus: üldiselt kohandatud vastavalt kliendi poolt pakutava tüki välimuse suurusele.1. konksu tüüp; 2. haaramise tüüp; 3. pingutamise tüüp; 4. sisetõusu tüüp; 5. liftitüüp; 6. haardetüüp; 7. käepideme pöörde teisendus (pööramine 90° või 180°) 0; 8. vaakum-adsorptsioon; 9. vaakum-adsorptsiooni pöörde transformatsioon (pööramine 90° või 180°) ja muud, spetsiaalselt valitud ja välja töötatud ning kujundatud, on saavutanud hea kasutusefekti.
4. Host: koosneb peamiselt tasakaalustatud silindrist ja jäigast mitmest väljalülituskonsoolist ning peamised parameetrid on tõstevõime ja teenindusraadius.







